


EasyGo Simulate 生產線規劃仿真軟件
本產品通過Tecnomatix官方軟件提供的開 發接口環境進行工具開發,開發工具集成到軟件 中,使用方式如同使用軟件自帶功能相同。
設備運動機構自動定義
減少繁瑣過程
將旋轉運行機構和直線運動機構定義操作簡單化,減少操作不當所造成的錯誤,避免錯選漏選 部件,提高機構定義可靠性,加快驗證進度;
自動快速定義
只需輸入簡單的參數,程序自動識別其余部件,直接完成整個動作定義過程,包括部件分類、 動作創建、姿態創建、上下極限設置及顏色設置等,一步到位。
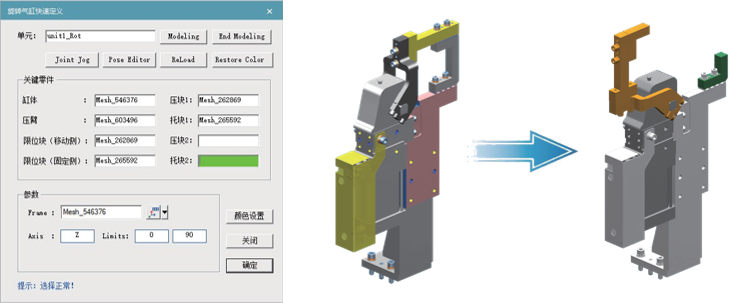
相比較于Process Simulate標準的功能【運動學編輯器】,當前開發功能,減少了手 動選擇連桿單元的工作,也無需使用【創建關節】的命令來手動逐步操作。

基于當前運動機構定義的應用數據處理的階段,配合自動拆分單元機構及數據批量轉換的 開發功能,能顯著提升仿真模型的數據處理速度,極大提升仿真數據處理的效率。
標準顏色快速著色
高效靈活
自定義配置標準顏色,導入導出預配置標準顏色;
快捷方便
單一簡潔界面和簡單操作,批量選取部件,快速完成 部件著色;

可以根據每個企業的標準進行定制化開發,形成規范的著色功能。
四連桿機構根據顏色標準快速創建連桿
基于標準顏色
在快速著色功能對部件完成著色后,利用顏色屬性進行創建連桿;
快捷劃分單元部件
根據顏色一鍵區分,劃分為四連桿機構的四個不同連桿;

四連桿機構定義與旋轉、直線運動機構有所不同,由于其機構的復雜性,不便于一鍵生成運動機 構,當前開發功能利用顏色標準化后的特性快速生成。基于定義好的標準顏色基礎上對部件進行快速 分組,減少標準功能在選擇連桿單元時重復選取的繁瑣操作,可快速選擇并將部件歸類進連桿中。
機器人離線信號自動編程
配置信號標準
預配置現有品牌機器人程序特殊位置點的離線編程命令(OLP)標準,指定標準規則;
自動快速添加
對應特殊軌跡點,自動添加離線程序信號,如修磨位置、等待位置、抓手抓放位等。

隨著機器人仿真標準化及規范化程度越來越高,越來越細致,很多重復性的添加離線編程命令(OLP) ,可以根據規則,通過開發功能,實現快速的一鍵寫入。與Process Simulate標準的機器人離線編程命令 編輯功能的手動添加命令相比較,自動編程的方式,可以很大地減少人工手動添加和寫入命令的工作量。
開發需求:
企業在軟件應用過程中常感到軟件使用過程中的痛點如:操作步驟復雜、需要重復操作 的步驟多、無法統一大家的操作過程(難以保證數據結果的一致性)等問題,這些可歸結為 軟件使用過程中的效率低和數據質量無法保證問題。 為解決以上問題,幾乎所有的工業軟件都開放二次開發接口,允許用戶對軟件進行二次 開發,以擴展功能、組合功能或定制新功能以滿足自身需求。西門子Tecnomatix 軟件即提 供完善成熟的二次開發環境,并每年在不同國家舉辦二次開發者大會,鼓勵用戶對軟件功能 進行擴展以滿足自身需求。
自動導出機器人信息
高效靈活
用于導出所選機器人的相關信息至Excel 表及自動生成相應數據的透視表;
快捷方便
解決了人工統計機器人信息時效率低、易出錯問題,輸出文檔用于機器人清單核對;
導出信息包含:
所在線體、所在工位、機器人名稱、控制器名稱、機器人資源所在路徑、機器人相對于世界原點坐標、 相對于當前工作坐標系坐標、機器人在home姿態時各軸軸值以及安裝在機器人上的工具和工具資源所 在路徑等。也可根據企業需求,增加或刪減相關的導出信息。
自動創建機器人干涉檢查
快速創建
機器人進行仿真驗證前,用于快速自動地創建單個機器人干涉檢查對;
高效準確
批量選取,解決人工逐個創建干涉檢查效率低的問題,快速準確。

機器人路徑快速檢查
自定義檢查規則
根據各品牌機器人的特性,預設置好奇異點、臨界點、軸值轉變過大等的檢測規則;
快速一鍵檢查
一鍵檢查機器人仿真軌跡的每個點的姿態,快速便捷發現并排查錯誤;

通常在Process Simulate中對機器人軌跡進行檢查,都是將機器人路徑加載至路徑編輯器 中進行仿真查看,逐個軌跡點進行確認,由于機器人路徑點數量龐大,修改頻繁,人工檢查奇異 點與臨界點幾乎不可行,而奇異點和臨界點的存在是很危險的,可能有誤差就會導致機器人運行 與仿真差異很大。

機器人軟限位批量設置
自定義檢查規則
仿真驗證前設置機器人軟限位,保證機器人各運動軸有足夠余量;
快速一鍵檢查
達到一鍵設置所選機器人軟件位功能,及檢查機器人軟限位設置是否合理。

解決軟限位設置效率低問題,解決因工作量大,人工幾乎不可能在項目過程中檢查所有軟限位設置正確性的問題,保證機器人仿真有足夠余量。與Process Simulate標準的軟限 位設置功能相比較,機器人軟限位批量設置的開發功能可以按照預設值快速實現設置軟限位 值,而標準功能只能逐個機器人進行手動設置。

設備單元自動拆分
減少繁瑣過程
此功能為 Caita 軟件的二次開發工具,用于快速將 Catia 內的數據進行拆分;
自動快速導出
只需選擇對應的Catia樹結構目錄,即可一鍵導出cgr格式文件,以便對子層級的數據進行轉換。

機器人離線程序自動導出
批量導出程序
用于Process Simulate 支持OLP離線編程品牌的機器人,對離線程序批量快速導出;
導出并檢查程序
機器人離線程序將會批量導出并存儲至相應路徑,并彈出一個 Excel 表報告導出結果。

名稱批量修改
高效靈活
批量快速且靈活地修改傳感器信號名稱,解決人工逐個修改傳感器信號名稱效率低、正確性無 法保證問題;
快捷方便
可以對資源、操作、信號等數據名稱批量修改進行修改,利用Excel快速排序編輯的功能來優 化仿真命名;

客戶評價:
通過EasyGo生產線規劃仿真應用程序,實現擴展功能、組合功能或定制新功能,滿足部門自身 需求,效率的提升很大的降低變更修改成本,根據每個功能的效率提升估計,每個二次開發 工具解決的單個問題的效率提升效果是極顯著的,反映到整個項目的仿真過程中,估計能夠 降低項目仿真總工時約5%。
——工裝模具技術科 席平

快速生成和導入邏輯塊
自定義邏輯
根據以往項目積累的智能組件邏輯功能,將其預配置好在安裝程序中,實現快速生成和導入;
一鍵生成
可一鍵將企業定制的標準邏輯功能導入現有的資源模型中并創建連接電氣信號;

其它應用程序功能
以上是基于EasyGo生產線規劃仿真應用程序的一些常用功能介紹,通常會與設計軟件Catia、NX進行接口對接,輸入輸出的一些圖表結果則與Excel 進行交互。另外還有其它的一些二次開發功能如下表所示,在企業進行工藝規劃及仿真的工作效率上也 有很大提升。
|
開發項 |
功能描述 |
|
導入標準PD結構樹 |
PD創建項目時一鍵導入標準結構,使供應商PD數據結構統一 |
|
導入標準PD資源庫 |
快速導入企業標準資源庫,保證調用相同的庫資源數據 |
|
設備批量切換姿態 |
將設備資源一鍵切換為打開、關閉或預設定好的狀態 |
|
從Catia導入焊點 |
讀取已打開的Catia焊點數據并導入PD,建立制造特征庫 |
|
導出插槍圖至Catia |
PS中焊槍的打焊接姿態批量快速導入至Catia中 |
案例分析
東風日產乘用車公司,其工程部門-新車準備技術科,需對生產線的仿真模型進行數據處理 和驗證,該部門已運用Tecnomatix Process Simulate生產線仿真軟件進行生產線數字化仿 真驗證,在導入EasyGo PDPS二次開發功能插件后,迅速實現了標準化、快速化的仿真, 大幅度減少人為錯誤,減少繁瑣操作,降低工作強度,顯著縮短項目實施周期。
|
主要開發功能 |
使用前狀態 |
使用后狀態 |
提升效率 |
|
運動機構定義 |
單個資源逐一編輯,重復操作,耗時費力 |
一鍵定義生成機構 |
200% |
|
機器人軌跡檢查 |
手動檢查,逐條路徑運行查看及導出數據 |
快速檢查批量導出 |
500% |
|
標準顏色著色 |
重復對應設備對象著色,繁瑣低效 |
標準化快速著色 |
100% |
|
機構自動拆分 |
逐個手動導出,重復低效,漏選錯選 |
一鍵自動處理導出 |
300% |
聯系我們 / Contact us

掃碼關注我們

今宏科技
廣州今宏信息科技有限公司(英文標識Gohope)為致力提升企業競爭力的制造型企業及經理人打造一個綜合的技術服務平臺。由于我們對于設計制造一體化、客戶化及標準化的深刻認識,我們愿與客戶結為伙伴,提升產品研發生產速度,幫助企業建立強大的產品研發體系,促進制造企業技術轉型,提高運營效率、降低復雜度,從而幫助制造企業加快產品上市時間并讓人從容不迫。
關于我們 / About us